Marine EM System in Shallow-Water Environment
-Seamless Subsurface Visualization-
Last Updated: April 13, 2021
Large research vessels cannot enter shallow water. Moreover, rough waves near the coast often make it difficult to obtain reliable data because they sway around the conventional data acquisition equipment placed on the seafloor and cause interference noise. We have therefore developed electromagnetic (EM) exploration equipment that is less affected by waves and small enough to be carried on small vessels.
To demonstrate the performance of the new exploration system, EM measurements were carried out along a survey line of about 20 km long (about 10 km each for land and sea) in the Horonobe coastal area, Hokkaido. Comprehensive interpretation of the results of the measurements and other geological surveys shows that the sandstone layer below the land is filled with fresh groundwater and extends offshore to 10 km. The freshwater is indicated to exists in the offshore layer, too, which means the groundwater infiltrated during the past glacial age is considered to have remained fresh without being replaced by the seawater despite periods of submergence.
Our research enables continuous visualization of underground structure from land to sea. The estimation of underground structure and groundwater status provides valuable information to decide on the most suitable location in various projects such as construction of important infrastructures in coastal areas, geological disposal of radioactive waste and geological storage of CO2. Our system visualizes subsurface structures and the distribution of groundwater as well as provides information and clues to know its properties.
Reference:
Ueda, T., Mitsuhata, Y., Uchida, T., Marui, A., and Ohsawa, K. (2014), A new marine magnetotelluric measurement system in a shallow-water environment for hydrogeological study, Journal of Applied Geophysics, 100, 23-31, https://doi.org/10.1016/j.jappgeo.2013.10.003.

Marine electromagnetic (EM) system in a shallow-water environment
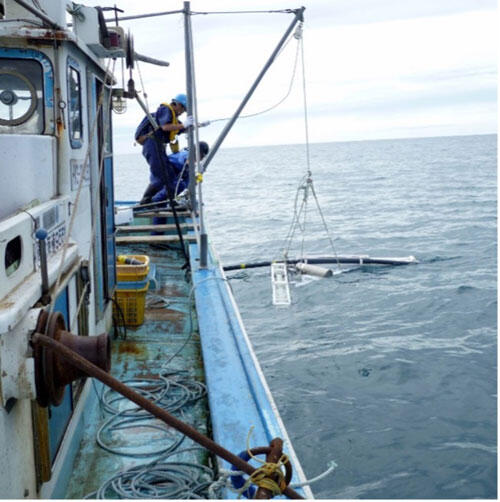
Deployment of the EM system from a boat. After Ueda et al. (2014)